
YUKEHUA PLC代替数控系统及应用于机械手动作示教控制及例程程序下载
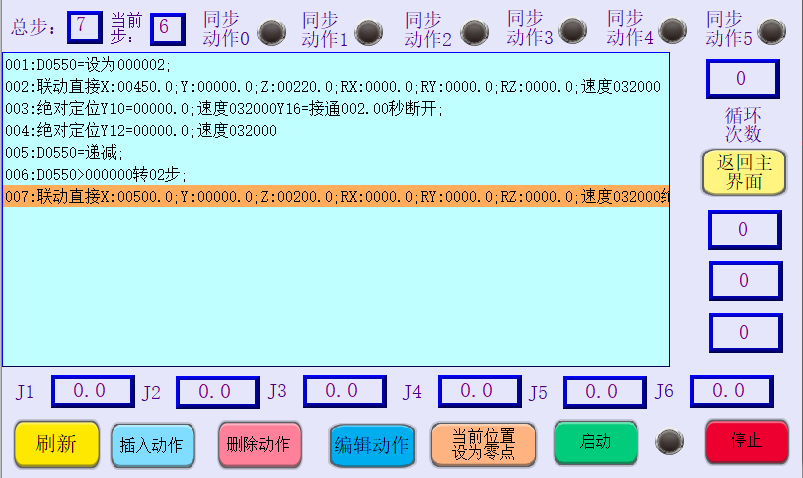
一、触摸屏示教或手机 APP 示教界面:例程程序及触摸屏界面下载
YUKEHUA PLC代替数控系统及应用于机械手动作示教控制。主要用到两条指令(FLRD,FLWR)就可实现,
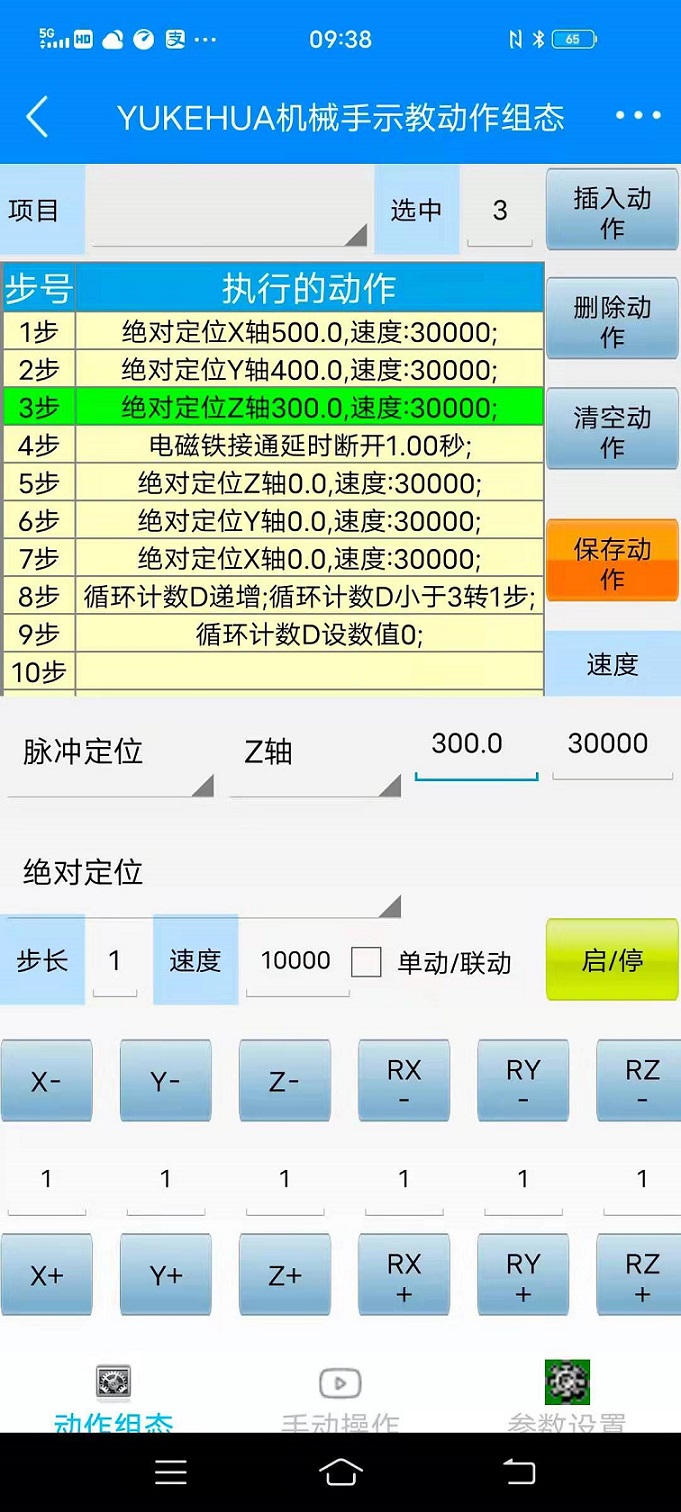
简单易用。几分钟可以在触摸屏上面组态动作,或者用手机APP组态动作,通过PLC内置WIFI模块更新动作数据。
二、动作组态保存指令:
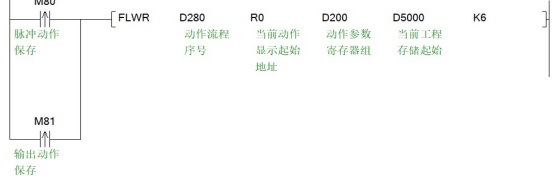
1、指令说明:
第一个参数 D280:占用 4 个寄存器,D280-283。D282 为 1 时刷新触摸屏动作显示,D283 为
总流程步数。组态的动作流程要保存进第几号,执行动作时从 0 步流程开始执行。
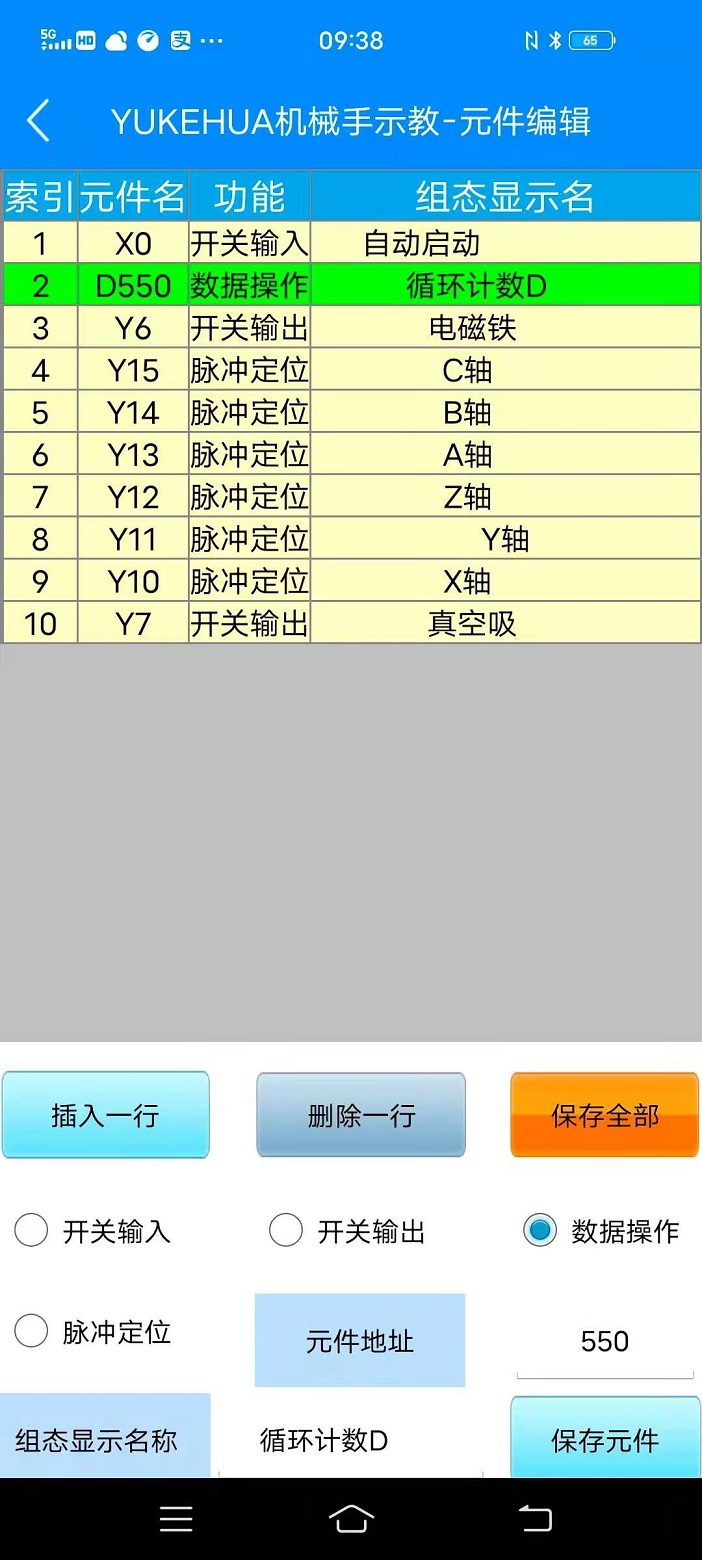
第二个参数 R0:当前动作组态显示内容,可以在触摸屏上面做个项目选单元件显示。 R0-99 显示当前动作,R100-199 显示第一个动作,R200-299 显示第二个动作,以此类推。
第三个参数 D200:组态动作输入参数。从 D200 开始到 D207,一个动作占用 16 个寄存器。
第四个参数 D5000:指定 D5000 开始用于保存组态动作流程。
第五个参数 K6:指定一个流程最多可以同时执行多少个动作。该参数设 6,就是一个流程最
多可以同时执行 6 个动作,由于一个动作需要 16 个寄存器参数,要保存 6 个动作为一
个流 程,要用到 96 个寄存器,第二个参数寄存器就要从 D200 至 D295。
2、第二个参数格式具体说明:
●脉冲输出动作示教:
|
D200+0 |
D200 |
执行动作代码 0:没有动作;6:绝对定位; 7:相对定位;8:原点回归; |
|
D200+1 |
D201 |
指定动作输出口 |
|
D200+2 |
D202 |
指定脉冲输出方向口 |
|
D200+3 |
D203 |
动作6为原点开关输入点, 动作11为连续插补坐标数 |
|
D200+4 |
D204,D205 |
脉冲目标位置,32位 |
|
D200+6 |
D206,D207 |
脉冲输出频率,32位 |
|
绝对定位例子,Y0作为脉冲输出口,Y20作为脉冲方向口 |
||
|
D200+0 |
D200 |
动作代码:6 |
|
D200+1 |
D201 |
脉冲输出:0 |
|
D200+2 |
D202 |
脉冲方向:20 |
|
D200+4 |
D204,D205 |
绝对定位目标位置:2000 |
|
D200+6 |
D206,D207 |
绝对定位脉冲运行频率:32000 |
|
原点回归例子,Y0作为脉冲输出口,Y20作为脉冲方向口,X0作为原点开关 |
||
|
D200+0 |
D200 |
动作代码:6 |
|
D200+1 |
D201 |
脉冲输出:0 |
|
D200+2 |
D202 |
脉冲方向:20 |
|
D200+3 |
D203 |
原点输入X:0 |
|
D200+6 |
D206,D207 |
原点回归运行频率,自动加减速,启动频率与停止频率为该频率除10 |
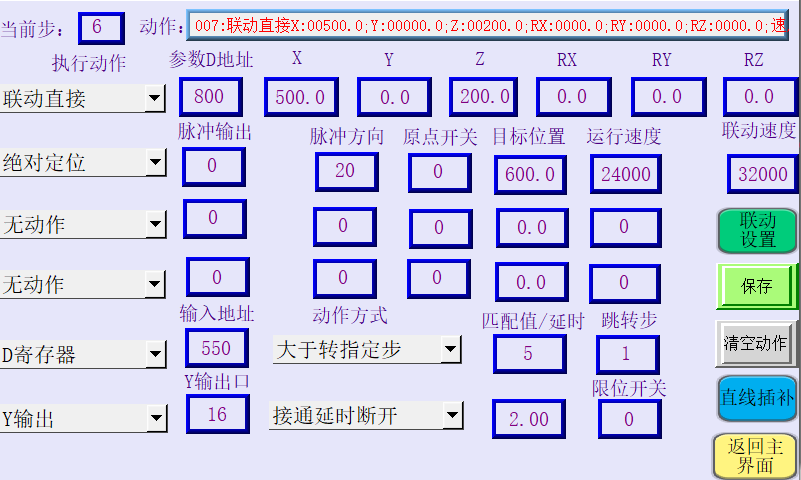
●多轴联动动作示教:
D200
组态动
作类型
代码
执行动作代码
0:没有动作;10:多轴联动单坐标直接数据;
11:多轴联动多坐标间接数据;
D201
多轴联
动示教
指令参
数
组
多轴联动参数占用 13 个寄存器,D201 如设为 800
D800:指定起始脉冲输出口。
D801:指定起始方向输出口。
D802:联动轴数,六轴机械手设 6。
D803:坐标间隔,每组坐标占用的寄存器数量,六轴机械手设 12
1 个轴占 2 个寄存器。
D804:联动模式,0 为直接执行给定坐标;1 为给定坐标转为各关节角度(用于 6 轴机械手控制)再执行脉冲动作
D805:指定各轴校准系数起始地址,脉冲转长度或角度的校准,示教给定值 PLC 内部乘 10000 然后除以这个系数,等于实际要执行的脉 冲数。
D806:指定各轴最大值(软限位)起始地址。
D807:指定各轴最小值(软限位)起始地址。
D808:指定六轴机械手关节参数的起始地址,占用 12 个寄存器。
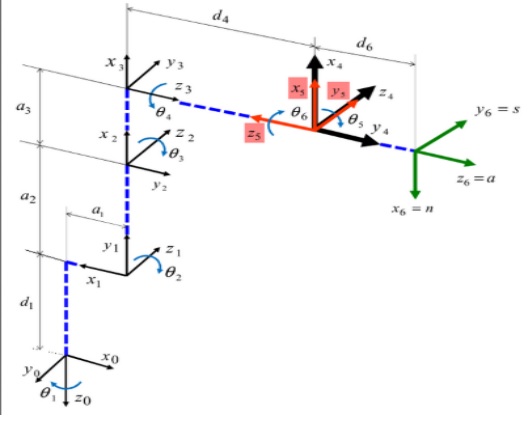
设为 374,那么 D374 为机械手参数的 d1,D375 为机械手参数的 a1,D376为机械手参数的 a2,D377 为机械手参数的 a3,D378 为机械手参数的d4,D379 为机械手参数的 d6。D380 为机械手关节 1 的方向,D381 为机械手关节 2 的方向,以此类推,为 1 方向不变,为-1 方向反向。
D809:指定执行状态的寄存器起始地址。如设为 388,那么执行错误 PLC 内部把 D388 置 1,D389 为已完成的坐标数
D810:坐标转关节角度保存位置(逆解后的角度)如设840,那么第一个关节角度就在D840里,第二个关节角度就在D842里。
D811:连续坐标数。D200=10 时直接数据应设 1,D200=11 时坐标间接地址应设定为要连续运行的坐标数,一般最大在 100 以内;
D812:运行起始坐标。设 0,从第一个坐标开始运行;
D202
D202
第1轴的直接坐标数据或间接数据的地址
D204
D204
第2轴的直接坐标数据或间接数据的地址
D206
D206
第3轴的直接坐标数据或间接数据的地址
D208
D208
第4轴的直接坐标数据或间接数据的地址
D210
D210
第5轴的直接坐标数据或间接数据的地址
D212
D212
第6轴的直接坐标数据或间接数据的地址
D214
D214
指定多轴联动的速度,直接数据 D214 的的值直接为执行速度,间接数据 时 D214 的值为多个坐标的运行速度寄存器起始地址,每个坐标可以不同
的速度。
●开关量输出Y动作组态参数:
|
D200+0 |
D200 |
执行动作代码 0:没有动作;3:Y输出; |
|
D200+1 |
D201 |
指定Y输出口 |
|
D200+2 |
D202 |
输出动作方式: 0:Y接通 1:断开 2:Y先接通后延时 3:先延时后接通 4:接通到限位 5:接通到限位断开 6:Y先接通后延时断开 7:断开后延时 |
|
D200+3 |
D203 |
指定X限位开关输入点 |
|
D200+4 |
D204 |
延时时间 |
|
D200+6 |
D206,D207 |
|
|
Y10接通例子 |
||
|
D200+0 |
D200 |
动作代码:3 |
|
D200+1 |
D201 |
Y输出:10 |
|
D200+2 |
D202 |
输出动作方式:0 |
|
Y10接通2秒后转下一步 |
||
|
D200+0 |
D200 |
动作代码:3 |
|
D200+1 |
D201 |
Y输出:10 |
|
D200+2 |
D202 |
输出动作方式:2 |
|
D200+4 |
D204 |
延时时间(10MS):200 |
|
Y10接通,到限位X10接通,Y10断开 |
||
|
D200+0 |
D200 |
动作代码:3 |
|
D200+1 |
D201 |
Y输出:10 |
|
D200+2 |
D202 |
输出动作方式:5 |
|
D200+3 |
D203 |
限位开关输入点:10 |
●开关量输入X动作组态参数:
|
D200+0 |
D200 |
执行动作代码 0:没有动作;2:X输入; |
|
D200+1 |
D201 |
指定X输入点 |
|
D200+2 |
D202 |
输入动作方式: 0:X接通进入下一步 1:X接通断开进入下一步 2:X接通后延时进下一步 3:X断开后延时进下一步 |
|
D200+4 |
D204 |
延时时间 |
|
X10接通例子 |
||
|
D200+0 |
D200 |
动作代码:2 |
|
D200+1 |
D201 |
X输入:10 |
|
D200+2 |
D202 |
输入动作方式:0 |
|
X10接通2秒后转下一步 |
||
|
D200+0 |
D200 |
动作代码:2 |
|
D200+1 |
D201 |
X输入:10 |
|
D200+2 |
D202 |
输入动作方式:2 |
|
D200+4 |
D204 |
延时时间(10MS):200 |
●D寄存器动作组态参数:
|
D200+0 |
D200 |
执行动作代码 0:没有动作;5:D寄存器动作组态; |
|
D200+1 |
D201 |
指定寄存器地址 |
|
D200+2 |
D202 |
动作方式 0:等于 1:大于 2:小于 3:大于等于 4:小于等于 5:递增1 6:递减1 7:设定常数 |
|
D200+4 |
D204,D205 |
动作方式0-4为与寄存器比较的常数 动作方式5-7为设定寄存器的数值 |
|
D200+6 |
D206 |
该值为跳转的流程步 |
|
D200等于指定值500转8步 |
||
|
D200+0 |
D200 |
动作代码:5 |
|
D200+1 |
D201 |
寄存器地址:200 |
|
D200+2 |
D202 |
动作方式:0 |
|
D200+4 |
D204,D205 |
与寄存器比较的常数:500 |
|
D200+6 |
D206 |
跳转的流程步:8 |
|
D200递增1然后转6步 |
||
|
D200+0 |
D200 |
动作代码:5 |
|
D200+1 |
D201 |
寄存器地址:200 |
|
D200+2 |
D202 |
动作方式:5 |
|
D200+4 |
D204,D205 |
设定寄存器的数值:1 |
|
D200+6 |
D206,D207 |
跳转的流程步:6 |
|
D200设为3000然后转3步 |
||
|
D200+0 |
D200 |
动作代码:5 |
|
D200+1 |
D201 |
寄存器地址:200 |
|
D200+2 |
D202 |
动作方式:7 |
|
D200+4 |
D204,D205 |
设定寄存器的数值:3000 |
|
D200+6 |
D206,D207 |
跳转的流程步:3 |
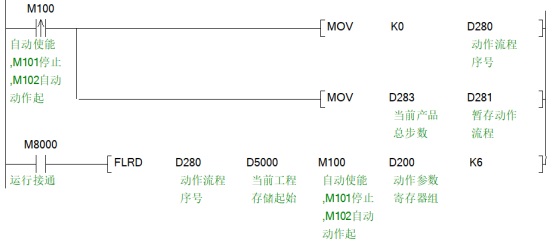
注:M100在触摸屏上的启动按钮,从0步开始执行组态好的动作,执行到D283步停止,FLRD指令会自动复位M100。一个步有6个同步动作,M102为第一个同步动作的运行指示,M103为第二个同步动作的运行指示,以此类推。M107为第六个同步动作的运行指示。运行中置位M101,停止动作。
四、脉冲定位示教(绝对定位,相对定位指定校准系数及软限位):
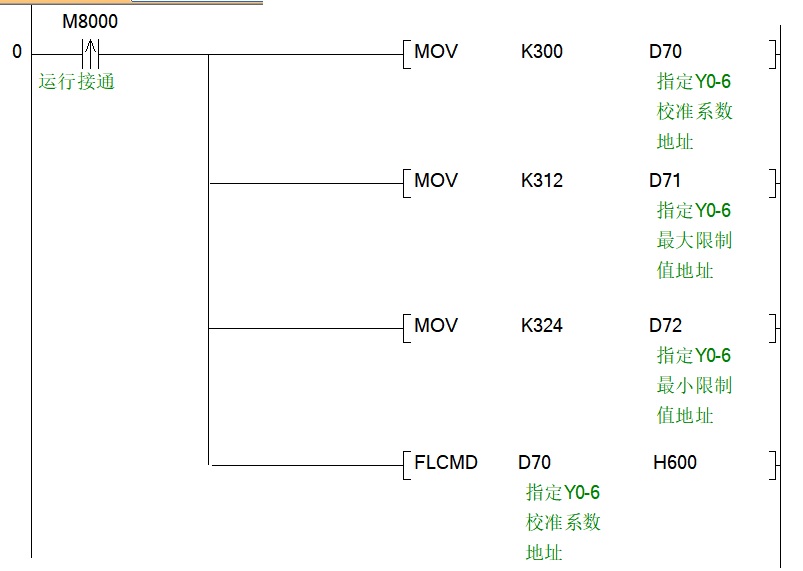
PLCMD第一个参数占用3个寄存器:该例设为D70,那么D70的值就是校准系数的寄存器起始地址。D71的值就是限定最大输出的寄存器起始地址,D72的值就是限定最小输出的寄存器起始地址。
PLCMD第二个参数:
1、低8为:指定D70-72的参数作用于哪个脉冲起始口,该例设0,那么Y0的校准系数就是D300,Y0最大值就在D312里面,Y0最小值就在D324里面;那么Y1的校准系数就是D302,Y0最大值就在D314里面,Y0最小值就在D326里面;
2、高8位:指定参数起作用的最大输出脉冲口,该例为6,那么这些参数就作用于Y0至Y5。
五、6轴机械手角度转末端坐标说明(正解)指令:

1、DFROM第一个参数S1:为6个关节角度寄存器起始地址,该例D180开始,也就是说关节1的角度在D180里。关节2的角度在D182里。以此类推,一个关节角度占用2个寄存器。
2、DFROM第二个参数S2:为机械手关节参数,占用12个寄存器,如设为D374,那么D374为机械手参数的d1,D375为机械手参数的a1,D376为机械手参数的a2,D377为机械手参数的a3,D378为机械手参数的d4,D379为机械手参数的d6。D380为机械手关节1的方向,D381为机械手关节2的方向,以此类推,为1方向不变,为-1方向反向。
3、DFROM第三个参数S3:关节角度转世界坐标后的数据保存寄存器地址,该例设为D840该参数共占用12个寄存器。D840为X坐标,D842为Y坐标,D844为Z坐标,D846为RX坐标,D848为RY坐标,D850为RZ坐标。
4、DFROM第四个参数S4:备用。
注:输入的关节角度为整数,关节1角度为100.5,D180值应为10050度,因为DFROM内部会除于100。转换后的坐标为数据也为整数,单位为0.1mm,如D840数据为5000,X坐标实际就等于是500.0mm。
六、独立指令DTO用于多轴联动控制的说明:
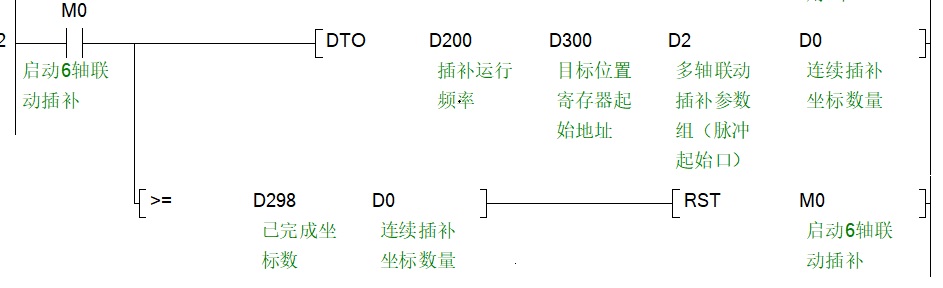
1、DTO第一个参数S1:为运行速度起始地址,该例D200开始,也就是说运行坐标1时速度在D200里。运行坐标2时速度在D202里。以此类推,一个坐标速度占用2个寄存器。
2、DTO第二个参数S2:为运行坐标的起始寄存器地址,该例D300开始,也就是说坐标1在D300里。坐标2在D302里。以此类推,一个坐标占用2个寄存器。该参数为整数,单位0.1mm,500mm寄存器的值应为5000。
3、DTO第三个参数S3:指定多轴联动所需的各个参数,该参数共占用11个寄存器,该例为D2-D12,详细作用如下表:
|
地址 |
功能 |
备注 |
|
S3 D2 |
脉冲输出起始口 |
Y0开始就设0 |
|
S3+1 D3 |
脉冲方向输出起始口 |
Y10开始就设10 |
|
S3+2 D4 |
联动轴数 |
控制六轴机械手就设6 |
|
S3+3 D5 |
坐标间隔 |
一个轴占用2个D,控制六轴就设12 |
|
S3+4 D6 |
运行模式 |
0为直线插补,参数2的数据直接为输入的角度或长度。设1为六轴机械手模式,参数2的数据为机械手末端坐标X(D300),Y(302),Z(304),RX(306),RY(308),RZ(310) |
|
S3+5 D7 |
各轴校准系数起始地址 |
如设为400,那么第一个轴的校准系数就在D400,第一个轴实际输出脉冲数就是D300(轴1的第一个坐标)*10000/D400,这个计算是在PLC内部处理的。 |
|
S3+6 D8 |
限定各轴的最大值 |
如设为412,那么第一个轴的最大值就在D412里,第二个轴的最大值就在D414里, 输入坐标大于最大值,以最大值输出。 |
|
S3+7 D9 |
限定各轴的最小值 |
如设为424,那么第一个轴的最小值就在D424里,第二个轴的最小值就在D426里, 输入坐标小于最小值,就以最小值输出。 |
|
S3+8 D10 |
六轴机械手关节参数 |
占用12个寄存器,如设为436,那么D436为机械手参数的d1,D437为机械手参数的a1,D438为机械手参数的a2,D439为机械手参数的a3,D440为机械手参数的d4,D441为机械手参数的d6。D442为机械手关节1的方向,D443为机械手关节2的方向,以此类推,为1方向不变,为-1方向反向。 |
|
|
||
|
S3+9 D11 |
执行状态寄存器地址 |
如设为297,那么执行错误PLC内部把D297置1,D298为已完成的坐标数 |
|
S3+10 D12 |
坐标转关节角度保存位置(逆解后的角度) |
如设800,那么第一个关节角度就在D800里,第二个关节角度就在D802里。 |
七、支持的PLC型号如下:
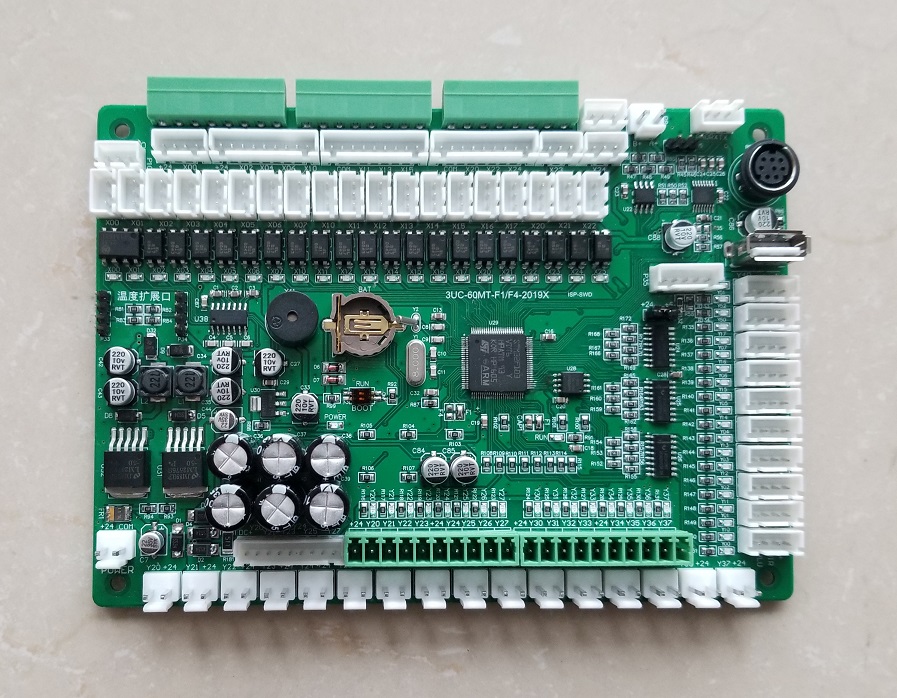
1、YDA60MT-F4-2AI-DC24:
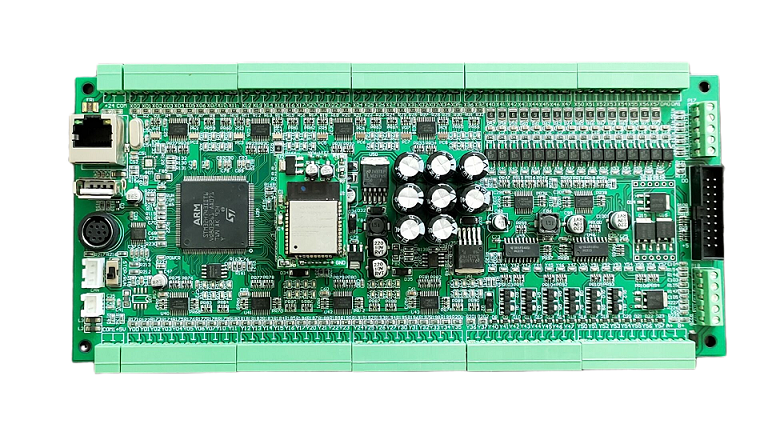
2、YDA96MT-H7-8AI-DC24系列:
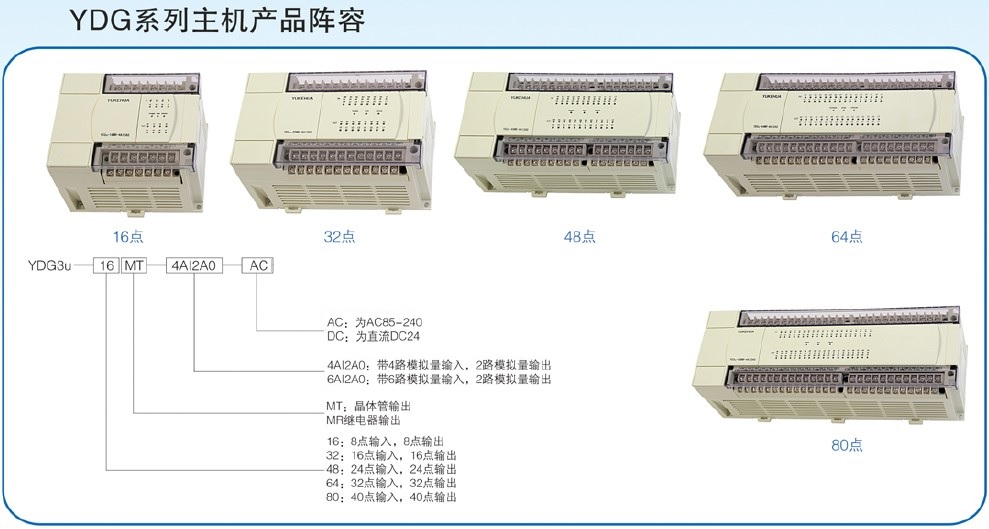
3、YDG标准外壳F4系列:
- 上一篇:没有啦
- 下一篇:纯电动茶叶包装机解决方案 2020/8/11