
YUKEHUA PLC控制六轴机械手运行多个坐标及正解逆解指令说明
一、多轴联动指令:
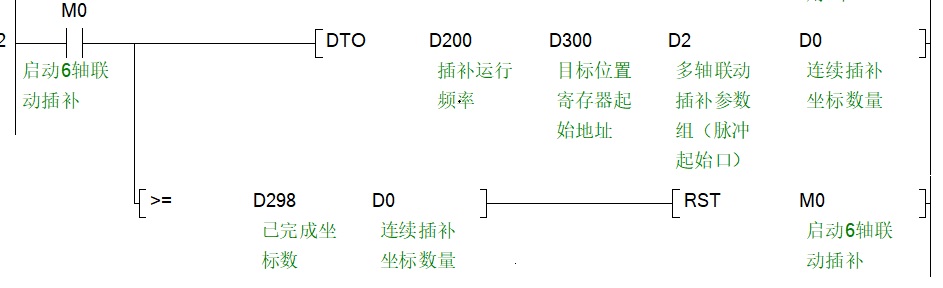
二、DTO指令说明:
1、DTO第一个参数S1:为运行速度起始地址,该例D200开始,也就是说运行坐标1时速度在D200里。运行坐标2时
速度在D202里。以此类推,一个坐标速度占用2个寄存器。
2、DTO第二个参数S2:为运行坐标的起始寄存器地址,该例D300开始,也就是说坐标1在D300里。坐标2在D302里。
以此类推,一个坐标占用2个寄存器。该参数为整数,单位0.1mm,500mm寄存器的值应为5000。
3、DTO第三个参数S3:指定多轴联动所需的各个参数,该参数共占用11个寄存器,该例为D2-D12,详细作用如下表:
4、DTO第四个参数:共2个寄存器,该例为D0,那么坐标数量就在D0里,D1指定启动时从哪个坐标开始运行,设0,就
从第一个坐标D300处运行。设1,就从第二个坐标D312处运行。
地址
功能
备注
S3 D2
脉冲输出起始口
Y0开始就设0
S3+1 D3
脉冲方向输出起始口
Y10开始就设10
S3+2 D4
联动轴数
控制六轴机械手就设6
S3+3 D5
坐标间隔
一个轴占用2个D,控制六轴就设12
S3+4 D6
运行模式
0为直线插补,参数2的数据直接为输入的角度或长度。设1为六轴机械手模式,参数2的数据为机械手末端坐标X(D300),Y(302),Z(304),RX(306),RY(308),RZ(310)
S3+5 D7
各轴校准系数起始地址
如设为400,那么第一个轴的校准系数就在D400,第一个轴实际输出脉冲数就是D300(轴1的第一个坐标)*10000/D400,这个计算是在PLC内部处理的。
S3+6 D8
限定各轴的最大值
如设为412,那么第一个轴的最大值就在D412里,第二个轴的最大值就在D414里,
输入坐标大于最大值,以最大值输出。
S3+7 D9
限定各轴的最小值
如设为424,那么第一个轴的最小值就在D424里,第二个轴的最小值就在D426里,
输入坐标小于最小值,就以最小值输出。
S3+8 D10
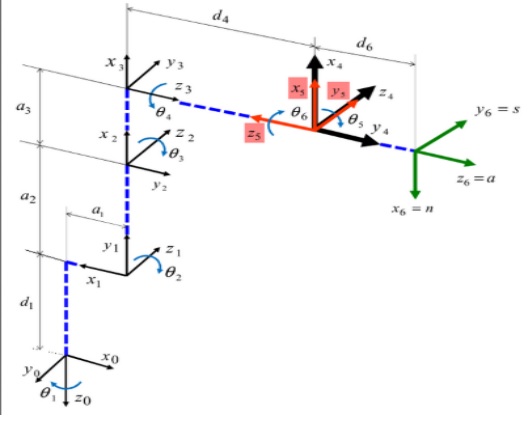
六轴机械手关节参数
占用12个寄存器,如设为436,那么D436为机械手参数的d1,D437为机械手参数的a1,D438为机械手参数的a2,D439为机械手参数的a3,D440为机械手参数的d4,D441为机械手参数的d6。D442为机械手关节1的方向,D443为机械手关节2的方向,以此类推,为1方向不变,为-1方向反向。
S3+9 D11
执行状态寄存器地址
如设为297,那么执行错误PLC内部把D297置1,D298为已完成的坐标数
S3+10 D12
坐标转关节角度保存位置(逆解后的角度)
如设800,那么第一个关节角度就在D800里,第二个关节角度就在D802里。
三、六轴机械手角度转末端坐标说明(正解):
1、梯形图指令:

2、DFROM第一个参数S1:为6个关节角度寄存器起始地址,该例D180开始,也就是说关节1的角度在D180里。
关节2的角度在D182里。以此类推,一个关节角度占用2个寄存器。
3、DFROM第二个参数S2:为机械手关节参数,占用12个寄存器,如设为D374,那么D374为机械手参数的d1,
D375为机械手参数的a1,D376为机械手参数的a2,D377为机械手参数的a3,D378为机械手参数的d4,D379为机械手参数的d6。
D380为机械手关节1的方向,D381为机械手关节2的方向,以此类推,为1方向不变,为-1方向反向。
4、DFROM第三个参数S3:关节角度转世界坐标后的数据保存寄存器地址,该例设为D840该参数共占用12个寄存器。
D840为X坐标,D842为Y坐标,D844为Z坐标,D846为RX坐标,D848为RY坐标,D850为RZ坐标。
5、DFROM第四个参数S4:备用。
注:输入的关节角度为整数,关节1角度为100.5,D180值应为10050度,因为DFROM内部会除于100。
转换后的坐标为数据也为整数,单位为0.1mm,如D840数据为5000,X坐标实际就等于是500.0mm。
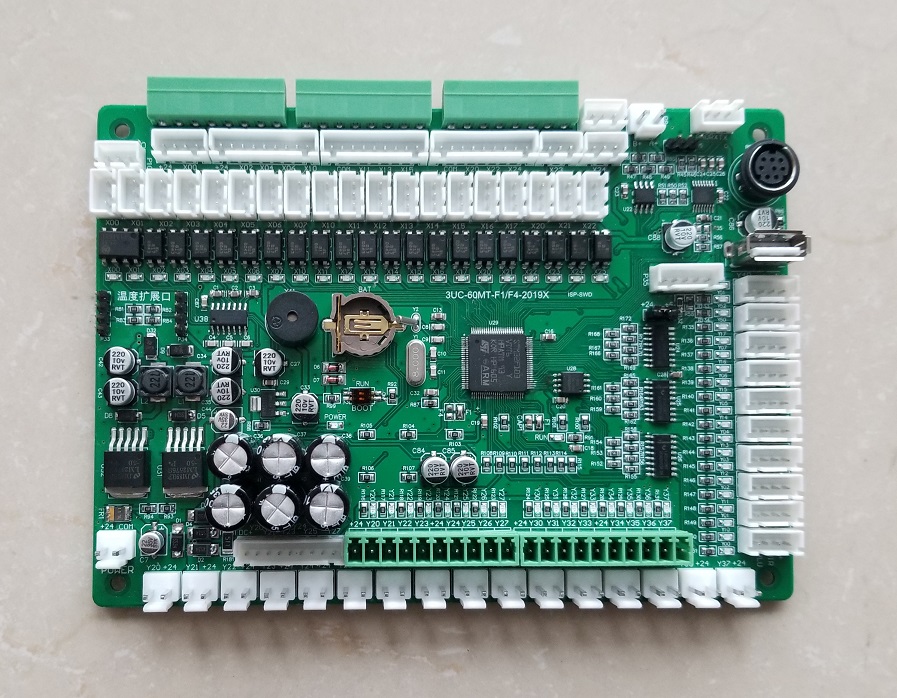
四、支持的PLC型号如下:
1、YDA60MT-F4-2AI-DC24:
2、YDA96MT-H7-8AI-DC24系列:
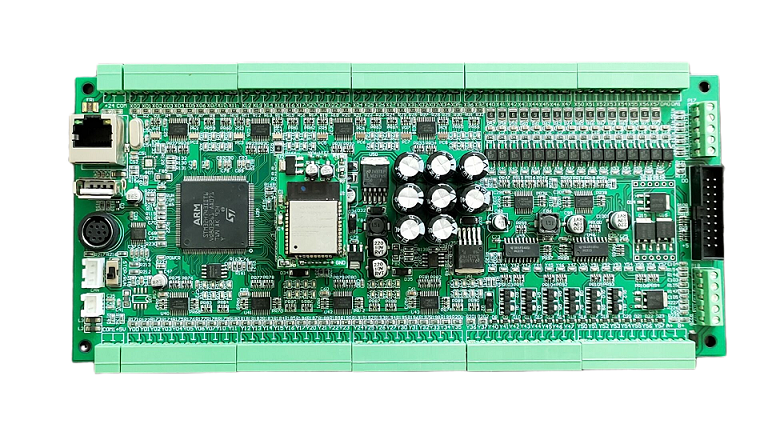
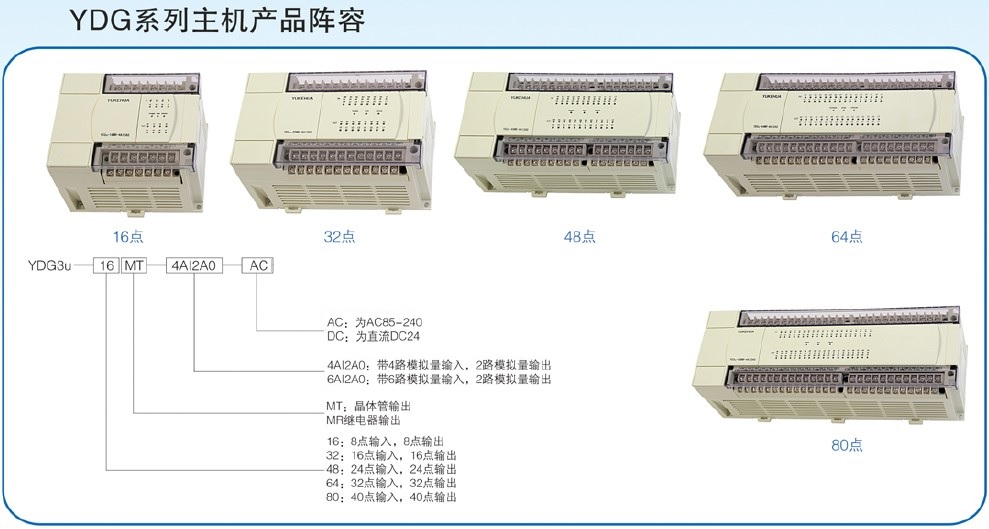
3、YDG标准外壳F4系列:
- 上一篇:温度模块测试设置软件 2017/6/26
- 下一篇:YDD3u-80MT-2AI2AO-F4十四轴PLC说明 2017/6/9