
YDH136MT 24轴高速输出说明
高速脉冲输出与脉宽调制:支持24路脉冲输出Y0-27(PLSY,PLSV,PLSR,DRVA,DRVI,ZRN,DSZR,DVIT),频率最高200K。
|
脉冲 |
输出脉 冲数 |
输出标记 |
脉冲禁止 |
最低输出频率 |
加减速时间 |
DSZR,DVIT方向 |
DVIT中断输入X地址 |
原点回归速度 |
原点回归爬行速度 |
ZRN爬行脉冲数 |
|
Y0 |
D8132 |
M8147 |
M8141 |
D8144 |
D8145 |
M8080 |
D8080 |
D8220 |
D8090 |
D8072 |
|
Y1 |
D8134 |
M8148 |
M8142 |
D8146 |
D8147 |
M8081 |
D8081 |
D8221 |
D8091 |
D8073 |
|
Y2 |
D8136 |
M8149 |
M8143 |
D8148 |
D8149 |
M8082 |
D8082 |
D8222 |
D8092 |
D8074 |
|
Y3 |
D8138 |
M8150 |
M8144 |
D8150 |
D8151 |
M8083 |
D8083 |
D8223 |
D8093 |
D8075 |
|
Y4 |
D8140 |
M8151 |
M8145 |
D8152 |
D8153 |
M8084 |
D8084 |
D8224 |
D8094 |
D8076 |
|
Y5 |
D8142 |
M8152 |
M8146 |
D8154 |
D8155 |
M8085 |
D8085 |
D8225 |
D8095 |
D8077 |
|
Y6 |
D8166 |
M8153 |
M8155 |
D8156 |
D8157 |
M8086 |
D8086 |
D8226 |
D8096 |
D8078 |
|
Y7 |
D8168 |
M8154 |
M8156 |
D8158 |
D8159 |
M8087 |
D8087 |
D8227 |
D8097 |
D8079 |
|
Y10 |
D8240 |
M8192 |
M8276 |
D8288 |
D8289 |
M8088 |
D8336 |
D8360 |
D8384 |
D8408 |
|
Y11 |
D8242 |
M8193 |
M8277 |
D8290 |
D8291 |
M8089 |
D8337 |
D8361 |
D8385 |
D8409 |
|
Y12 |
D8244 |
M8194 |
M8278 |
D8292 |
D8293 |
M8090 |
D8338 |
D8362 |
D8386 |
D8410 |
|
Y13 |
D8246 |
M8195 |
M8279 |
D8294 |
D8295 |
M8091 |
D8339 |
D8363 |
D8387 |
D8411 |
|
Y14 |
D8248 |
M8196 |
M8280 |
D8296 |
D8297 |
M8300 |
D8340 |
D8364 |
D8388 |
D8412 |
|
Y15 |
D8250 |
M8197 |
M8281 |
D8298 |
D8299 |
M8301 |
D8341 |
D8365 |
D8389 |
D8413 |
|
Y16 |
D8252 |
M8198 |
M8282 |
D8300 |
D8301 |
M8302 |
D8342 |
D8366 |
D8390 |
D8414 |
|
Y17 |
D8254 |
M8199 |
M8283 |
D8302 |
D8303 |
M8303 |
D8343 |
D8367 |
D8391 |
D8415 |
|
Y20 |
D8256 |
M8260 |
M8284 |
D8304 |
D8305 |
M8304 |
D8344 |
D8368 |
D8392 |
D8416 |
|
Y21 |
D8258 |
M8261 |
M8285 |
D8306 |
D8307 |
M8305 |
D8345 |
D8369 |
D8393 |
D8417 |
|
Y22 |
D8260 |
M8262 |
M8286 |
D8308 |
D8309 |
M8306 |
D8346 |
D8370 |
D8394 |
D8418 |
|
Y23 |
D8262 |
M8263 |
M8287 |
D8310 |
D8311 |
M8307 |
D8347 |
D8371 |
D8395 |
D8419 |
|
Y24 |
D8264 |
M8264 |
M8288 |
D8312 |
D8313 |
M8308 |
D8348 |
D8372 |
D8396 |
D8420 |
|
Y25 |
D8266 |
M8265 |
M8289 |
D8314 |
D8315 |
M8309 |
D8349 |
D8373 |
D8397 |
D8421 |
|
Y26 |
D8268 |
M8266 |
M8290 |
D8316 |
D8317 |
M8310 |
D8350 |
D8374 |
D8398 |
D8422 |
|
Y27 |
D8270 |
M8267 |
M8291 |
D8318 |
D8319 |
M8311 |
D8351 |
D8375 |
D8399 |
D8423 |
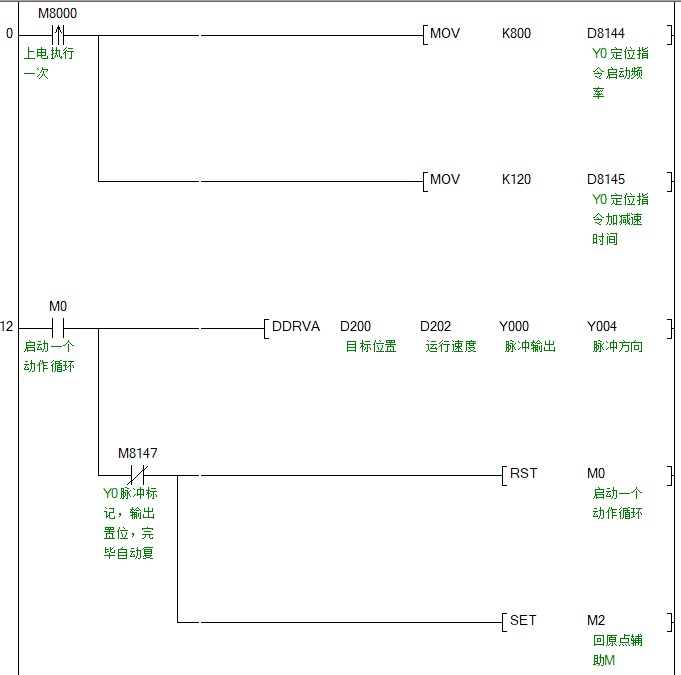
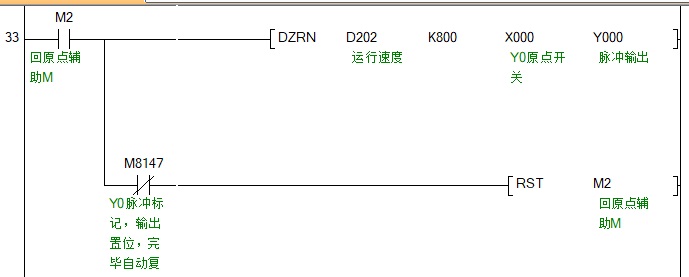
DDRVA绝对定位指令及回原点(原点指令带加减速)例程
- 上一篇:PLC连接WIFI模块实现远程下载程序及监控 2019/4/9
- 下一篇:YUKEHUA PLC与威纶通触摸屏通信 2019/4/2