
PLC之间CAN通信例程
2019/3/13 11:31:40 点击:
CAN主机间自动通信:
|
站号 |
数据交换区 |
|
0 |
D3500至3500 + ( D8181 x 4 ) |
|
1 |
3500 + (D8121 x ( D8181 x 4 ))至3500 + (D8121 x ( D8181 x 4 )) +(D8181 x 4) |
|
注:D8181决定一个站占用多少个D,设1每个站占用4个D,设2每个站占用8个D |
|
CAN通信例: LDP M8000 //上电执行一次
MOV K1 D8181 //每个站占用4个D,D3500开始
MOV K2 D8180 //间隔20MS数据刷新一次
SET M8181 //CAN主机通信允
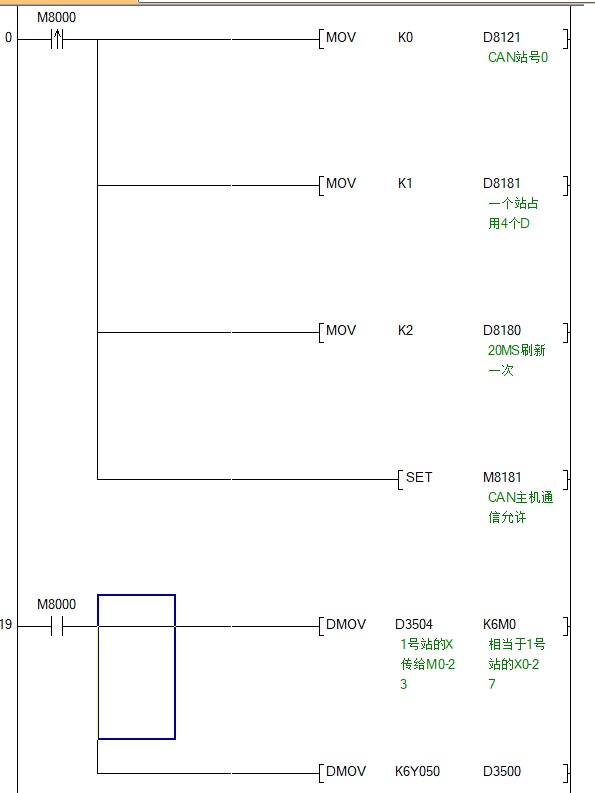
MOV K0 D8121 //设站号为0
当D8181设为1,站号0的PLC只要向D3500-3503写入数据,其它站号的PLC只要读取自身D3500-3503的数据
就等于读站号0的D3500-3503数据。站号0的PLC读取自身D3504-3507的数据就等于读取站号1的D3504-3507数据。
CAN通信时要把主机间的CAN_H与其它PLC的CAN_H相连,CAN_L与其它PLC的CAN_L相连。
站号0程序:
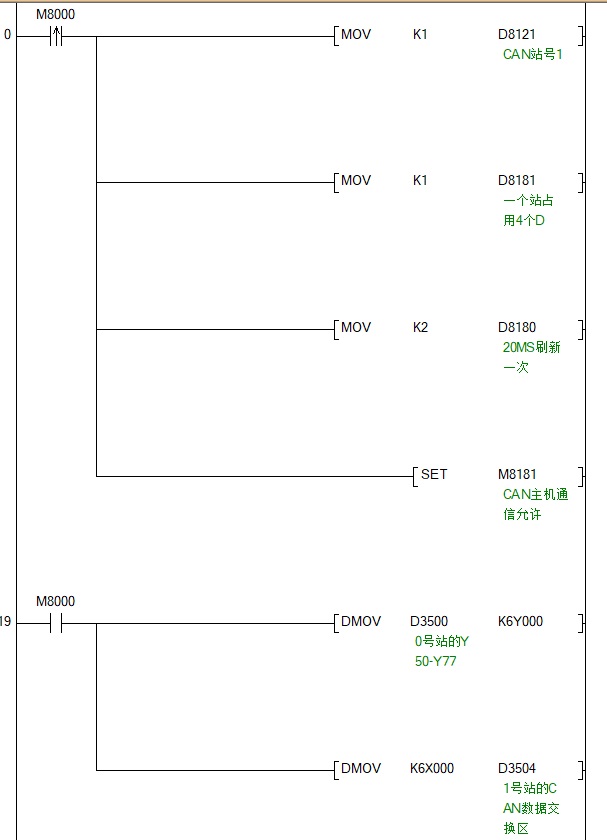
站号1程序:
- 上一篇:YUKEHUA PLC通过U盘更新程序 2019/3/14
- 下一篇:PLC绝对定位指令DDRVA与回原点DZRN例程 2018/12/29