
誉达国产PLC温度PID自整定功能及例程

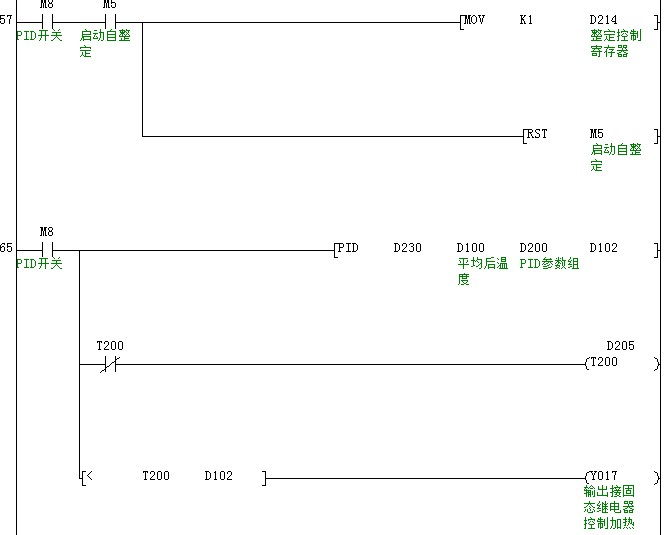
此指令用于进行PID控制的PID运算程序。
S1:设定的目标值;
S2:当前值(反馈回来的值);
S3:PID控制参数,占用S3开始的连续22个D寄存器。
|
S3 |
PID通道号,0-7 |
|
S3+1 |
比例系数KP,范围1-1000 |
|
S3+2 |
积分系数KI,范围0-1000 |
|
S3+3 |
微分系数KD,范围0-1000 |
|
S3+4 |
积分阀值,只有当误差小于此值才进行PID处理,否则只有比例控制。 |
|
S3+5 |
输出上限值PMAX,PID输出如果大于这个最大值,就以这个设定最大值输出 |
|
S3+6 |
输出下限值PMIN,PID输出如果小于这个最小值,就以这个最小值输出 |
|
S3+7 |
低8位为PID算法:为0是位置式PID;为1是增量式PID 高8为控制模式:0加热模式;1制令模式; |
|
S3+8至 S3+13 |
自整定时PLC内部占用,用户程序不能再用该寄存器 |
|
S3+14 |
设定1时开始自整定,自整定完毕自动置为2。 |
|
S3+15 |
整定规则设定,范围0-5,一般选0或3。 |
|
S3+18 |
自整定输入滤波,一般设2-4 |
|
S3+16与S3+17 |
自整定时PLC内部占用,用户程序不能再用该寄存器 |
|
S3+19 |
PID运算周期,单位为10MS。 |
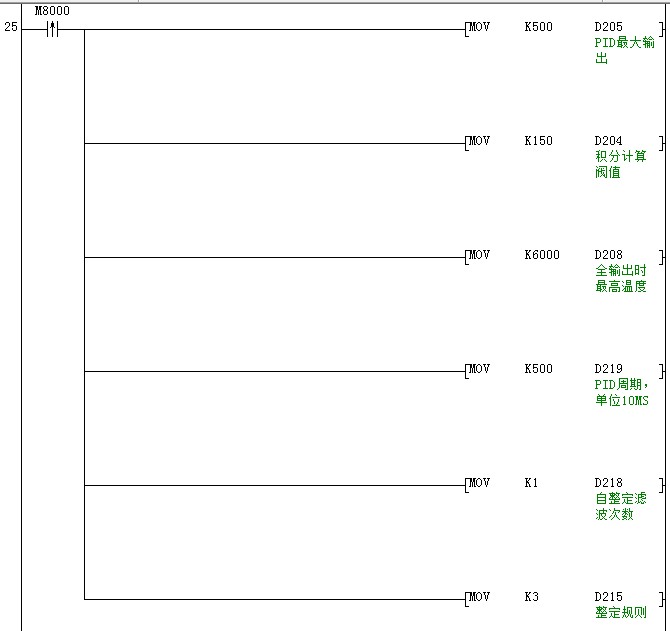
PLC控制温度例程:
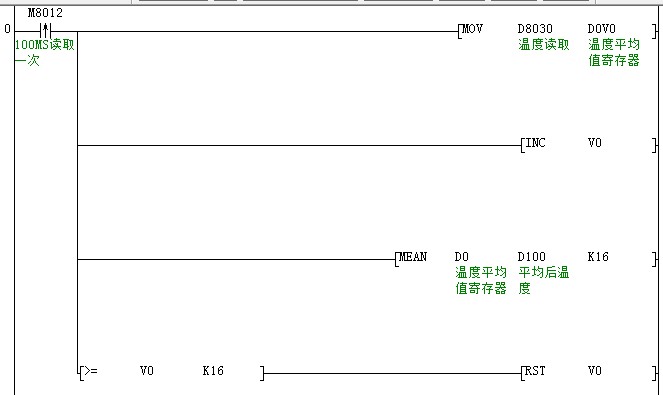
温度PID参数手动设定:把积分与微分设0,调整比例系数(PID输出控制值=(目标温度-当前温度)*比例系数),
启动PID后,如果实际温度高于设定温度,减小比例系数,一直到实际温度到达设定温度的90%左右,温度上升不了,
然后慢慢调大积分系数,使实际温度与设定温度误差最小。
- 上一篇:誉达国产PLC 控制步进电机加减速 2017/4/2
- 下一篇:誉达国产PLC输入输出接线 2017/4/2